
Robotique guidée par vision 3D
Série 3D VGR
Robotique guidée par vision 3D Série 3D VGR

Capacité de détection et simplicité d’utilisation inégalées
Matériel et algorithmes optimaux pour les systèmes de robotique guidée par vision 3D.
Solution de dévracage, prenant en charge la dépose aléatoire et en piles, la plus simple et rapide à configurer de l’industrie.

Caractéristiques
Les systèmes optiques et les algorithmes de recherche 3D développés par KEYENCE offrent des performances haute précision et haute vitesse
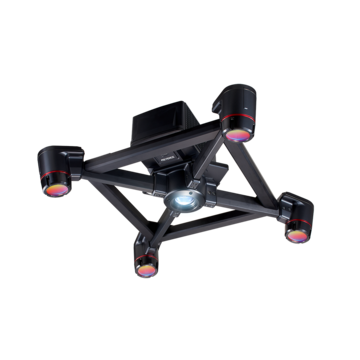
La fonction de recherche 3D nouvellement développée utilise quatre caméras distinctes pour créer une image 3D sans angles morts afin d’obtenir un taux de vidage de caisse optimal. Elle permet également une recherche stable des pièces cibles, quelle que soit leur position ou leur orientation.
Conception intégrée composée de quatre caméras et d’un seul projecteur haute résolution

Équipée d’une nouvelle fonction de balayage 3D

Calculer automatiquement les mouvements du robot, en tenant compte de l’équipement périphérique et de la position du robot
Outil de génération de trajectoire
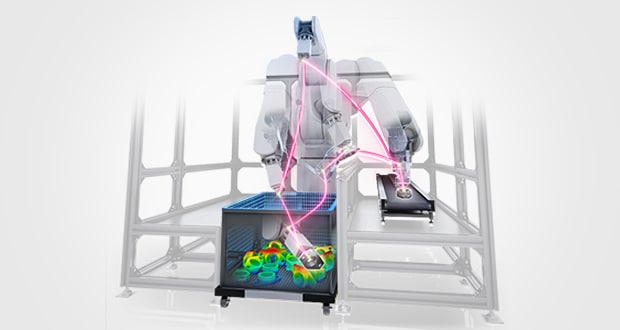
Génération automatique de trajectoire
Le déplacement optimal du robot peut être automatiquement calculé en prenant en compte les équipements périphériques et la posture initiale, réduisant ainsi considérablement le temps consacré à la programmation robot tout en garantissant un fonctionnement stable.
Simulateur de préhension

Modélisation de l’environnement de travail
Simulez le fonctionnement de l'application dès l'avant projet pour optimiser le positionnement des éléments de votre machine (robot, préhenseur, position de caisse, etc…) et ainsi concevoir la machine autour du pourcentage de vidage caisse souhaité.